#include <crm_internal.h>#include <stdlib.h>#include <string.h>#include <signal.h>#include <errno.h>#include <sys/wait.h>#include <crm/crm.h>#include <crm/common/xml.h>#include <crm/common/mainloop.h>#include <crm/common/ipc_internal.h>#include <qb/qbarray.h>#include <crm/common/mainloop_compat.h>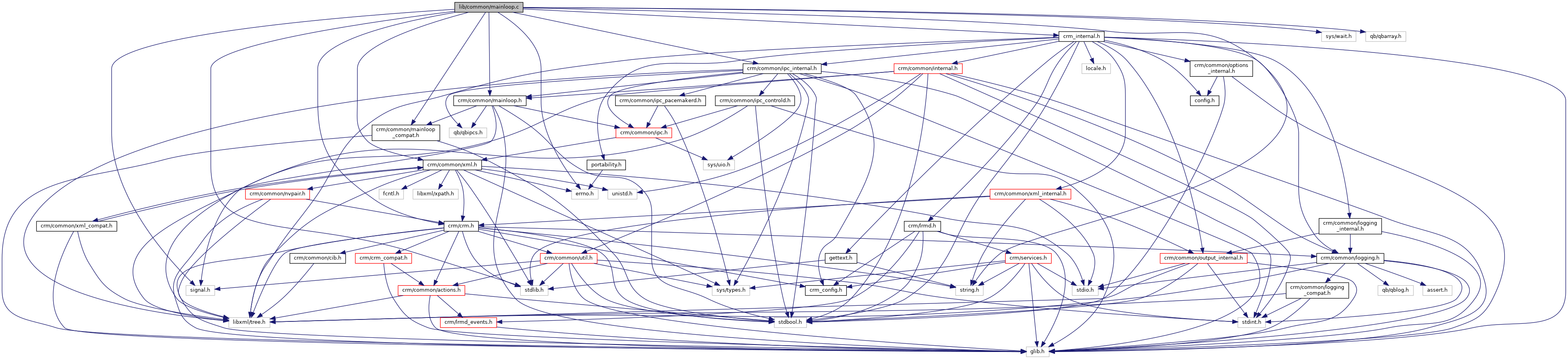
Go to the source code of this file.
Macros | |
| #define | _GNU_SOURCE |
Typedefs | |
| typedef struct signal_s | crm_signal_t |
Functions | |
| void | mainloop_trigger_complete (crm_trigger_t *trig) |
| crm_trigger_t * | mainloop_add_trigger (int priority, int(*dispatch)(gpointer user_data), gpointer userdata) |
| Create a trigger to be used as a mainloop source. More... | |
| void | mainloop_set_trigger (crm_trigger_t *source) |
| gboolean | mainloop_destroy_trigger (crm_trigger_t *source) |
| sighandler_t | crm_signal_handler (int sig, sighandler_t dispatch) |
| gboolean | mainloop_add_signal (int sig, void(*dispatch)(int sig)) |
| gboolean | mainloop_destroy_signal (int sig) |
| void | mainloop_cleanup (void) |
| qb_ipcs_service_t * | mainloop_add_ipc_server (const char *name, enum qb_ipc_type type, struct qb_ipcs_service_handlers *callbacks) |
| qb_ipcs_service_t * | mainloop_add_ipc_server_with_prio (const char *name, enum qb_ipc_type type, struct qb_ipcs_service_handlers *callbacks, enum qb_loop_priority prio) |
| Start server-side API end-point, hooked into the internal event loop. More... | |
| void | mainloop_del_ipc_server (qb_ipcs_service_t *server) |
| int | pcmk__add_mainloop_ipc (crm_ipc_t *ipc, int priority, void *userdata, const struct ipc_client_callbacks *callbacks, mainloop_io_t **source) |
| Connect to IPC and add it as a main loop source. More... | |
| guint | pcmk__mainloop_timer_get_period (const mainloop_timer_t *timer) |
| Get period for mainloop timer. More... | |
| mainloop_io_t * | mainloop_add_ipc_client (const char *name, int priority, size_t max_size, void *userdata, struct ipc_client_callbacks *callbacks) |
| void | mainloop_del_ipc_client (mainloop_io_t *client) |
| crm_ipc_t * | mainloop_get_ipc_client (mainloop_io_t *client) |
| mainloop_io_t * | mainloop_add_fd (const char *name, int priority, int fd, void *userdata, struct mainloop_fd_callbacks *callbacks) |
| void | mainloop_del_fd (mainloop_io_t *client) |
| pid_t | mainloop_child_pid (mainloop_child_t *child) |
| const char * | mainloop_child_name (mainloop_child_t *child) |
| int | mainloop_child_timeout (mainloop_child_t *child) |
| void * | mainloop_child_userdata (mainloop_child_t *child) |
| void | mainloop_clear_child_userdata (mainloop_child_t *child) |
| gboolean | mainloop_child_kill (pid_t pid) |
| void | mainloop_child_add_with_flags (pid_t pid, int timeout, const char *desc, void *privatedata, enum mainloop_child_flags flags, void(*callback)(mainloop_child_t *p, pid_t pid, int core, int signo, int exitcode)) |
| void | mainloop_child_add (pid_t pid, int timeout, const char *desc, void *privatedata, void(*callback)(mainloop_child_t *p, pid_t pid, int core, int signo, int exitcode)) |
| bool | mainloop_timer_running (mainloop_timer_t *t) |
| void | mainloop_timer_start (mainloop_timer_t *t) |
| void | mainloop_timer_stop (mainloop_timer_t *t) |
| guint | mainloop_timer_set_period (mainloop_timer_t *t, guint period_ms) |
| mainloop_timer_t * | mainloop_timer_add (const char *name, guint period_ms, bool repeat, GSourceFunc cb, void *userdata) |
| void | mainloop_timer_del (mainloop_timer_t *t) |
| void | pcmk_quit_main_loop (GMainLoop *mloop, unsigned int n) |
| Drain some remaining main loop events then quit it. More... | |
| void | pcmk_drain_main_loop (GMainLoop *mloop, guint timer_ms, bool(*check)(guint)) |
| Process main loop events while a certain condition is met. More... | |
| gboolean | crm_signal (int sig, void(*dispatch)(int sig)) |
Variables | |
| struct qb_ipcs_poll_handlers | gio_poll_funcs |
Macro Definition Documentation
◆ _GNU_SOURCE
| #define _GNU_SOURCE |
Definition at line 13 of file mainloop.c.
Typedef Documentation
◆ crm_signal_t
| typedef struct signal_s crm_signal_t |
Function Documentation
◆ crm_signal()
| gboolean crm_signal | ( | int | sig, |
| void(*)(int sig) | dispatch | ||
| ) |
- Deprecated:
- Use crm_signal_handler() instead
Definition at line 1478 of file mainloop.c.
◆ crm_signal_handler()
| sighandler_t crm_signal_handler | ( | int | sig, |
| sighandler_t | dispatch | ||
| ) |
Definition at line 309 of file mainloop.c.
◆ mainloop_add_fd()
| mainloop_io_t* mainloop_add_fd | ( | const char * | name, |
| int | priority, | ||
| int | fd, | ||
| void * | userdata, | ||
| struct mainloop_fd_callbacks * | callbacks | ||
| ) |
Definition at line 959 of file mainloop.c.
◆ mainloop_add_ipc_client()
| mainloop_io_t* mainloop_add_ipc_client | ( | const char * | name, |
| int | priority, | ||
| size_t | max_size, | ||
| void * | userdata, | ||
| struct ipc_client_callbacks * | callbacks | ||
| ) |
Definition at line 919 of file mainloop.c.
◆ mainloop_add_ipc_server()
| qb_ipcs_service_t* mainloop_add_ipc_server | ( | const char * | name, |
| enum qb_ipc_type | type, | ||
| struct qb_ipcs_service_handlers * | callbacks | ||
| ) |
Definition at line 640 of file mainloop.c.
◆ mainloop_add_ipc_server_with_prio()
| qb_ipcs_service_t* mainloop_add_ipc_server_with_prio | ( | const char * | name, |
| enum qb_ipc_type | type, | ||
| struct qb_ipcs_service_handlers * | callbacks, | ||
| enum qb_loop_priority | prio | ||
| ) |
Start server-side API end-point, hooked into the internal event loop.
- Parameters
-
[in] name name of the IPC end-point ("address" for the client) [in] type selects libqb's IPC back-end (or use #QB_IPC_NATIVE) [in] callbacks defines libqb's IPC service-level handlers [in] priority priority relative to other events handled in the abstract handling loop, use #QB_LOOP_MED when unsure
- Returns
- libqb's opaque handle to the created service abstraction
- Note
- For portability concerns, do not use this function if you keep
priorityas #QB_LOOP_MED, stick with mainloop_add_ipc_server (with exactly such semantics) instead (once you link with this new symbol employed, you can't downgrade the library freely anymore). - The intended effect will only get fully reflected when run-time linked to patched libqb: https://github.com/ClusterLabs/libqb/pull/352
Definition at line 647 of file mainloop.c.
◆ mainloop_add_signal()
| gboolean mainloop_add_signal | ( | int | sig, |
| void(*)(int sig) | dispatch | ||
| ) |
Definition at line 357 of file mainloop.c.
◆ mainloop_add_trigger()
| crm_trigger_t* mainloop_add_trigger | ( | int | priority, |
| int(*)(gpointer user_data) | dispatch, | ||
| gpointer | userdata | ||
| ) |
Create a trigger to be used as a mainloop source.
- Parameters
-
[in] priority Relative priority of source (lower number is higher priority) [in] dispatch Trigger dispatch function (should return 0 to remove the trigger from the mainloop, -1 if the trigger should be kept but the job is still running and not complete, and 1 if the trigger should be kept and the job is complete) [in] userdata Pointer to pass to dispatch
- Returns
- Newly allocated mainloop source for trigger
Definition at line 187 of file mainloop.c.
◆ mainloop_child_add()
| void mainloop_child_add | ( | pid_t | pid, |
| int | timeout, | ||
| const char * | desc, | ||
| void * | privatedata, | ||
| void(*)(mainloop_child_t *p, pid_t pid, int core, int signo, int exitcode) | callback | ||
| ) |
Definition at line 1286 of file mainloop.c.
◆ mainloop_child_add_with_flags()
| void mainloop_child_add_with_flags | ( | pid_t | pid, |
| int | timeout, | ||
| const char * | desc, | ||
| void * | privatedata, | ||
| enum mainloop_child_flags | flags, | ||
| void(*)(mainloop_child_t *p, pid_t pid, int core, int signo, int exitcode) | callback | ||
| ) |
Definition at line 1255 of file mainloop.c.
◆ mainloop_child_kill()
| gboolean mainloop_child_kill | ( | pid_t | pid | ) |
Definition at line 1199 of file mainloop.c.
◆ mainloop_child_name()
| const char* mainloop_child_name | ( | mainloop_child_t * | child | ) |
Definition at line 1025 of file mainloop.c.
◆ mainloop_child_pid()
| pid_t mainloop_child_pid | ( | mainloop_child_t * | child | ) |
Definition at line 1019 of file mainloop.c.
◆ mainloop_child_timeout()
| int mainloop_child_timeout | ( | mainloop_child_t * | child | ) |
Definition at line 1031 of file mainloop.c.
◆ mainloop_child_userdata()
| void* mainloop_child_userdata | ( | mainloop_child_t * | child | ) |
Definition at line 1037 of file mainloop.c.
◆ mainloop_cleanup()
| void mainloop_cleanup | ( | void | ) |
Definition at line 421 of file mainloop.c.
◆ mainloop_clear_child_userdata()
| void mainloop_clear_child_userdata | ( | mainloop_child_t * | child | ) |
Definition at line 1043 of file mainloop.c.
◆ mainloop_del_fd()
| void mainloop_del_fd | ( | mainloop_io_t * | client | ) |
Definition at line 1003 of file mainloop.c.
◆ mainloop_del_ipc_client()
| void mainloop_del_ipc_client | ( | mainloop_io_t * | client | ) |
Definition at line 944 of file mainloop.c.
◆ mainloop_del_ipc_server()
| void mainloop_del_ipc_server | ( | qb_ipcs_service_t * | server | ) |
Definition at line 684 of file mainloop.c.
◆ mainloop_destroy_signal()
| gboolean mainloop_destroy_signal | ( | int | sig | ) |
Definition at line 401 of file mainloop.c.
◆ mainloop_destroy_trigger()
| gboolean mainloop_destroy_trigger | ( | crm_trigger_t * | source | ) |
Definition at line 208 of file mainloop.c.
◆ mainloop_get_ipc_client()
| crm_ipc_t* mainloop_get_ipc_client | ( | mainloop_io_t * | client | ) |
Definition at line 950 of file mainloop.c.
◆ mainloop_set_trigger()
| void mainloop_set_trigger | ( | crm_trigger_t * | source | ) |
Definition at line 200 of file mainloop.c.
◆ mainloop_timer_add()
| mainloop_timer_t* mainloop_timer_add | ( | const char * | name, |
| guint | period_ms, | ||
| bool | repeat, | ||
| GSourceFunc | cb, | ||
| void * | userdata | ||
| ) |
Definition at line 1369 of file mainloop.c.
◆ mainloop_timer_del()
| void mainloop_timer_del | ( | mainloop_timer_t * | t | ) |
Definition at line 1390 of file mainloop.c.
◆ mainloop_timer_running()
| bool mainloop_timer_running | ( | mainloop_timer_t * | t | ) |
Definition at line 1324 of file mainloop.c.
◆ mainloop_timer_set_period()
| guint mainloop_timer_set_period | ( | mainloop_timer_t * | t, |
| guint | period_ms | ||
| ) |
Definition at line 1353 of file mainloop.c.
◆ mainloop_timer_start()
| void mainloop_timer_start | ( | mainloop_timer_t * | t | ) |
Definition at line 1333 of file mainloop.c.
◆ mainloop_timer_stop()
| void mainloop_timer_stop | ( | mainloop_timer_t * | t | ) |
Definition at line 1343 of file mainloop.c.
◆ mainloop_trigger_complete()
| void mainloop_trigger_complete | ( | crm_trigger_t * | trig | ) |
Definition at line 168 of file mainloop.c.
◆ pcmk__add_mainloop_ipc()
| int pcmk__add_mainloop_ipc | ( | crm_ipc_t * | ipc, |
| int | priority, | ||
| void * | userdata, | ||
| const struct ipc_client_callbacks * | callbacks, | ||
| mainloop_io_t ** | source | ||
| ) |
Connect to IPC and add it as a main loop source.
- Parameters
-
[in,out] ipc IPC connection to add [in] priority Event source priority to use for connection [in] userdata Data to register with callbacks [in] callbacks Dispatch and destroy callbacks for connection [out] source Newly allocated event source
- Returns
- Standard Pacemaker return code
- Note
- On failure, the caller is still responsible for ipc. On success, the caller should call mainloop_del_ipc_client() when source is no longer needed, which will lead to the disconnection of the IPC later in the main loop if it is connected. However the IPC disconnects, mainloop_gio_destroy() will free ipc and source after calling the destroy callback.
Definition at line 864 of file mainloop.c.
◆ pcmk__mainloop_timer_get_period()
| guint pcmk__mainloop_timer_get_period | ( | const mainloop_timer_t * | timer | ) |
Get period for mainloop timer.
- Parameters
-
[in] timer Timer
- Returns
- Period in ms
Definition at line 910 of file mainloop.c.
◆ pcmk_drain_main_loop()
| void pcmk_drain_main_loop | ( | GMainLoop * | mloop, |
| guint | timer_ms, | ||
| bool(*)(guint) | check | ||
| ) |
Process main loop events while a certain condition is met.
- Parameters
-
[in,out] mloop Main loop to process [in] timer_ms Don't process longer than this amount of time [in] check Function that returns true if events should be processed
- Note
- This function is intended to be called at shutdown if certain important events should not be missed. The caller would likely quit the main loop or exit after calling this function. The check() function will be passed the remaining timeout in milliseconds.
Definition at line 1449 of file mainloop.c.
◆ pcmk_quit_main_loop()
| void pcmk_quit_main_loop | ( | GMainLoop * | mloop, |
| unsigned int | n | ||
| ) |
Drain some remaining main loop events then quit it.
- Parameters
-
[in,out] mloop Main loop to drain and quit [in] n Drain up to this many pending events
Definition at line 1420 of file mainloop.c.
Variable Documentation
◆ gio_poll_funcs
| struct qb_ipcs_poll_handlers gio_poll_funcs |
Definition at line 607 of file mainloop.c.
